Benutzer-Werkzeuge
CAN-Bus
Das Controller Area Network (CAN) ist ein von standardisierter echtzeitfähiger Bus für serielle Datenübertragung. Er gehört zu den Feldbussen.
Der CAN-Bus wurde von Bosch für Automotive Anwendungen entwickelt, er wird aber auch in den Bereichen Automation und Fertigungstechnik verwendet. Für Fahrzeugmodelle ab 2008 wird OBD-2 generell über CAN genutzt.
Der Vorteil des CAN-Bus gegenüber einer herkömmlichen Verdrahtung liegt darin, daß nicht für jedes Signal ein eigenes Kabel verwendet werden muss, sondern die Signale oder Messwerte seriell auf einer verdrillten 2-Draht-Leitung übermittelt werden. Die maximale Leitungslänge am CAN ist von der Übertragungs-Bitrate abhängig, bei 1 MBit/s beträgt diese ca. 40 m, bei 500 kBit/s sind ca. 100 m möglich, bei 125 kBit/s ca. 500 m.
Beim CAN-Bus gibt es unterschiedliche physikalische Ausführungen:
- Low-Speed CAN, hier betragen die rezessiven Spannungen 5 V und 0 V, die dominanten Spannungen ca. 0,7 V (CAN_LOW) und 4,3 V (CAN_HIGH). Bitraten von bis zu 125 kBit/s. 8 Byte CAN Frames. Spezielle CAN-Transceiver (z.B.TJA1054/TJA1055) beherrschen neben dem normalen Low-Speed-CAN (2-Signaldrähte mit differenzieller Übertragung) auch Eindrahtbetrieb.
- High-Speed CAN, hier beträgt die rezessive Spannung 2,5 V, die dominanten Spannungen ca. 1,4 V (CAN_LOW) und 3,6 V (CAN_HIGH). Bitraten von 40 kBit/s bis 1 MBit/s. 8 Byte CAN Frames.
- CAN-FD, ähnlich High-Speed CAN, nach der Arbitrationsphase wie bei High-Speed CAN wird die Bitrate zur schnelleren Übertragung der Nutzdaten erhöht. Bis zu 64 Byte große CAN Frames.
Man unterscheidet bei der Adressierung der CAN Nachrichten nach CAN 2.0A (11Bit ID) und CAN 2.0B (29Bit ID).
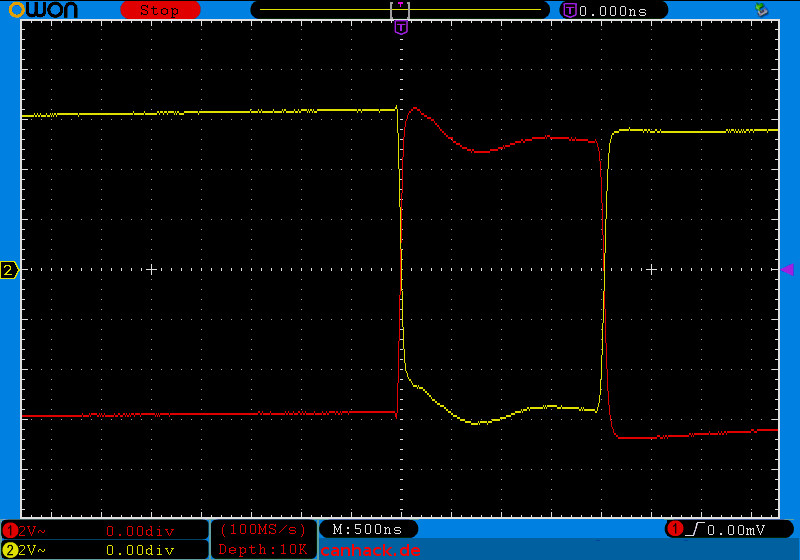
Beispiel für einen 500kBit/s High-Speed CAN mit 11 Bit ID (CAN 2.0A) an einem Motorsteuergerät:
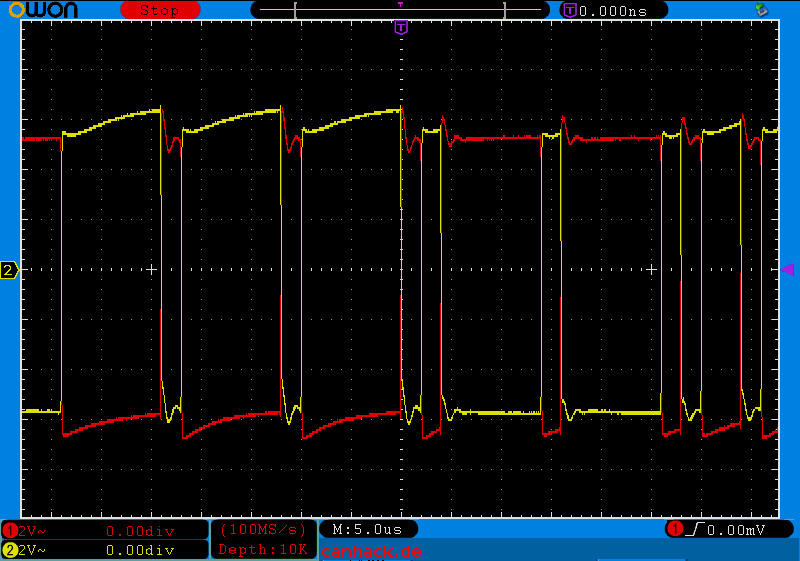
Wie man sieht, sind CAN-H und CAN-L gegenphasig. Der Vorteil ist, dass sich so Gleichtaktstörungen eliminieren:
Meist sind im Fahrzeug mehrere CAN-Busse vorhanden, z.B. CAN-Antrieb, CAN-Komfort und CAN-Infotainment, die jeweils die Steuergeräte funktionaler Gruppen verbinden. Die Geschwindigkeiten der im Fahrzeug verbauten CAN-Busse sind i.d.Regel nicht gleich, das CAN-Gateway Steuergerät verbindet die verschiedenen CAN-Busse und stellt bei der VAG-Gruppe auch den CAN-Diagnose bereit, der dann an der OBD-2-Buchse angelegt ist. Bei manchen Fahrzeugen (Ford-Modelle) ist auch direkt z.B. CAN-Antrieb auf die OBD-2-Buchse gelegt. Ein beliebter physikalischer Anschluss für CAN ist auch CIA DS102-1.
Beispiel für aufgezeichnete CAN-Messages (CAN-Bus Sniffing) mit Kaufmann Automotive GmbH KCANMonitor:
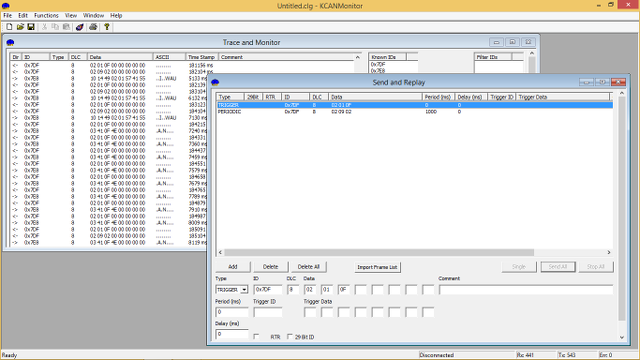
Je nach Geschwindigkeit und Buslast des jeweiligen CAN-Busses können sehr viele Nachrichten auflaufen, die beim „Sniffen“ auf dem Bus verarbeitet werden müssen. Um die Nachrichtenflut etwas eindämmen zu können, erlaubt KCANMonitor das Setzen von CAN-Filtern direkt im CAN-Interface.
CAN wird bei den meisten Fahrzeugen ab 2008 für die On-Board-Diagnose mit dem OBD-2 Protokoll verwendet. Bei Nutzfahrzeugen ist J1939 zur Diagnose verbreitet, im maritimen Bereich NMEA.
Links zum Thema: